Vertebrate brain theory
ISBN
978-3-00-064888-5
Monograph of Dr. rer. nat. Andreas Heinrich Malczan
5 Signal divergence in the mammalian primary cortex
5.1 Recapitulation of the past development and preview of the future
At this point we must remember the simple tetraneural nervous system of the simple bilateria, which consists of two rope ladder systems linked by cross-commissures to realize contralateral inhibition. The early primal brain of the chordatas emerged from it.
On each side of the body there was a rising, sensory ladder rail. Horizontal commissures on each segmental level transported the excitations of the sensors to the motor pole, which transported them to the (mostly) motor target neurons. From the uppermost segment, the early cortex emerged after the fusion of the uppermost segments had occurred. It disintegrated into a sensory and a motor cortex. After the splitting of the different modalities, the sensory cortex disintegrated into independent modal areas. As a result of this separation of modalities, the cranial turning loop became three independent loops: the temporal loop of hair cell receptors, the parietal loop of muscle sensors and the occipital loop of visual receptors. Other types of receptors developed later and also found their way into these cortical loops.
From the sensory cortex the class 3 axons moved to the motor cortex. Their excitation reached the class 5 neurons via interneurons, which projected downward to the motor neurons.
These descending axons arrived at the nucleus ruber, which was the nucleus of the primordial brain. Here the signals split into two identical copies. On the one hand, each signal was sent via class 5 neurons to the responsible motor neurons. On the other hand, it reached the nucleus olivarisvia class 2 neurons (via the commissure of the cross), which projected to the cerebellum.
In the nucleus olivaris the already described strong signal divergencedeveloped in the course of evolution to compensate for the failure of individual neurons. Thus the system acquired a high redundancy. With the signal divergence in the grey matter of the nucleus olivaris, signal attenuation also occurred, as a result of which the signals were digitized and encoded as minimum coded signals the strength of their original size. The early Cerebellum inverted these into maximum coded signals, which were useful for motor control. The vestibulocerebellum already served to invert the minimum coded signals of the neovestibular sense.
In the early spinocerebellum of that time, signal divergence only occurred between signal pairs that were complementary to each other. The muscle tension receptors of two muscles acting against each other at a simple joint delivered a pair of signals that were divergently distributed in the nucleus olivaris to a group of neurons whose neurons formed a linear divergence grid. Within this group of neurons, the joint angle was encoded in a minimum code. In the cerebellar nucleus of the spinocerebellum, signal inversion took place so that the neuron group there enabled the transformation into a maximum-coded signal vector.
In the first phase of expansion of the spinocerebellum,the moss fiber system developed, which transported the cortical output to the cerebellar cortex of the cerebellum. Between the cortex - the uppermost rung of the old rope ladder system - and the cerebellum at the level of the seventh segment was the crossing floor. Here all signals changed the side of the body. The many cortical axons formed their own nuclei here, which are now called bridge nuclei. The cortical output reaches the cerebellar cortex via the moss fibre system and the granule cells, whose axons ascended to the cerebellar cortex and formed the parallel fibres there. Thus the output of the temporal loop, the parital loop and the occipital loop reached the parallel fiber system of the cerebellum cortex. These three loops formed the primary sensory cortex areas. The corresponding receptor signals were supplied to these cortex areas on axons of neuron class 4 and switched to neurons of class 3. Their axons moved to the motor part of the cortex and reached there the class 5 neurons, which projected to the motor target neurons.
The class 3 cortical neurons took over the extremely important transmission from the sensory to the motor part of the system. The failure of individual neurons would have resulted in severe motor disturbances. Divergent transmission across several axons could have prevented this. Therefore, signal divergence gradually developed in the primary sensory cortex as well. The number of class 3 neurons increased slowly but steadily. From generation to generation there was a certain increase in the number of class 3 projection neurons, but in contrast to the nucleus olivaris, signal divergence did not occur on the basis of signal pairs. Let us take the skin's tactile receptors as an example. Here there was no pairing of receptors. Neighboring receptors were signal-related in the sense that a strong stimulation of one receptor usually also caused a certain stimulation of neighboring receptors because the mechanical stimulus spread over the surface. Therefore, the signal divergence in the primary cortex areas also occurred in the area. The input neurons of class 4 received the input of the thalamus and distributed it to a large number of class 3 neurons. Thus, signal divergence took place in the area.
Theorem of signal divergence in the primary cortex regions
The thalamic signals arrived on their axons in layer IV of the cortex and transferred their excitation to class 4 interneurons, which distributed their excitation over a much larger number of class 3 neurons, each class 4 neuron projecting into a larger group of cortical receptor neurons. Thus, the primary cortex became a flat divergence grid, independent of the modality.
It should be remembered here that the projection neurons of class 4 in the rope ladder system mutated into interneurons on the top cortical level, since there was no further segment above the cortical level.
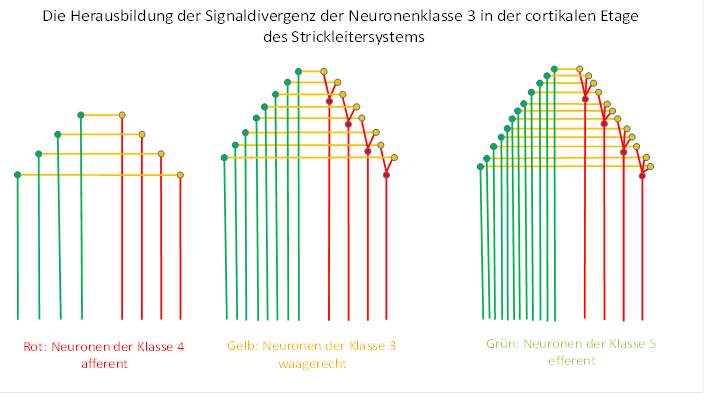
Figure 43 - Signal Divergence in the Cortical Floor
In the figure above, only the axons of class 4, 3 and 5 neurons are shown, the commissure formations of the individual floors (segments) have been omitted. In the uppermost cortical level, the ascending signals of the class 4 neurons are divergently distributed to class 3 neurons, whose axons move to the motor side and are switched to class 5 neurons.
The neurons of the different classes are arranged in separate layers in the cortical layer, which correspond to the layering in the cortex of vertebrates.
The primary sensory cortex - which received the ascending signals of all possible modalities of the head and trunk senses - developed, due to the strong signal divergence, into a divergence structurethat we refer to in this monograph as a flat divergence grid. It is irrelevant whether we consider the primary areas of the temporal lobe, the parietal lobe or the occipital lobe.
An increasing signal divergence in the nucleus olivaris had led to the formation of the spinocerebellum. Now, an equally strong signal divergence in the primary cortical areas began. A spatially well visible consequence was the inflation of the entire cortex cortex, which had to accommodate more and more class 3 neurons. As in the cerebellum, the cortex cortex expanded strongly, got wrinkles and finally formed a spherical surface, where the surface becomes maximum in relation to the volume. The topology in the axon course led to the cortex surface representing a body model of the input suppliers, which in neurology is called sensory homunculus. In the motor cortex areas there is a motor homunculus analogous to this.
In contrast to the early Spinocerebellum, however, no linear divergence grids were formed in the cortex, but plane divergence grids. The input excitation of class 4 neurons is distributed evenly in all directions, there are no preferential directions. The class 3 neurons receive these excitations. Their axons move towards the motor part and transfer their excitation to the class 5 projection neurons. Their number grew as well.
Now the cortex cortex belongs to the grey matter. The axons of the output neurons are only provided with a myelin sheath after leaving the cortical structure. The propagation of excitation in the grey matter of the cerebral cortex is therefore subject to a distance-dependent attenuation, as we have already observed in the nucleus olivaris.
Here, the distance-dependent damping leads to the formation of extreme excitation values in the area of the class 3 neurons. As expected, a minimum coding is performed. If, however, the input signals are dependent on each other, as is the case with the muscle tension receptors of the muscles of a joint, maximum coding of the joint angles may also develop. This is the case for joints with several degrees of freedom. While hinge joints and wheel joints have only one degree of freedom, egg joints and saddle joints already have two degrees of freedom. Ball joints even have three degrees of freedom. Each degree of freedom requires at least two muscles working against each other. With the development of joints with several degrees of freedom, the receptor signals involved were coupled together. This led to maximum-coded signalsin the surface of the parietal cortex, which encoded the joint angles involved. This will be shown in the following chapter.
The development of joints with two degrees of freedom was a basic prerequisite for the motor control of limbs. On the one hand, it had to be possible to lift and lower the limbs, and on the other hand, it had to be possible to move forwards and backwards. Thus (at least) two degrees of freedom were already required. The development of fins and later of extremities virtually required signal divergence in plane divergence grids in order to transform the involved joint angles into neuronal signals.
The formation of cortical divergence grids in the sensory cortex was the starting point for a developmentthat would ultimately lead to vertebrate intelligence. A further change in the basal ganglia system led to the development of the learning ability, which flourished in Homo sapiens.
It seems necessary to emphasize the analogy between the neuron layer of the nucleus olivaris and the neuron layer of the primary cortex regions. A strong signal divergence developed in both structures. The consequences of the signal divergence in the nucleus olivaris have been discussed in detail in this monograph. We now turn to signal divergence in the primary cortex regions. The input neurons of class 4 form flat divergence grids with the output neurons of class 3, in which this strong signal divergence takes place.
The signal divergence of all signals must be reversed before reaching the target structures, because the number of target neurons in the motor system remains approximately the same. For signal convergence, new structures were also formed that emerged from already existing ones.
Let us briefly analyze the convergence structures required for this. The class 3 output neurons in the primary cortex areas projected into the motor side of the frontal cortex, which was located in the motor ladder rail on the top floor of the rope ladder system. The axons arriving here contacted interneurons that projected directly onto the class 5 output neurons. Here, the strong cortical signal divergence was reversed by an equally strong signal convergence. Mute witnesses of this signal convergence in mammals are the Betz pyramid cells, which absorb the signals of the immediate environment and supply them to the motor system.
A second need to reverse the cortical signal divergence arose in the striatum. The main task of the striatum was to create a time-delayed and inhibitory copy of the cortex signals as an inhibitory component of a differential mapping, with which changes in the signal images of all modalities could be determined.
Before the signal divergence, each striate neuron received only one output signal from an associated cortex neuron - naturally via the substantia nigra pars compacta. After signal divergence, the original signal had become a whole signal bundle. This signal bundle also moved to the substantia nigra pars compacta and back towards the cortex, but without reaching it directly. The target neuron was located in the striatum. However, this target neuron now had to receive an entire signal bundle. Thus, it can be used to differentiate the striatum neurons. The original target neuron became the striosome neuron. The incoming signal bundle contacted newly formed striatum neurons that gathered around the striosome neuron and contacted it via interneurons. In this way, the signal divergence in the cortex could be reversed. The newly formed striatum neurons formed the matrix of the striatum, which projected ACH into the striosomes by means of the transmitter. From then on, the striatum consisted of the matrix in which the striosomes were embedded like raisins in a cake.
The striosome neuron represented the state before the onset of cortical signal divergence, while the matrix represented the state after the onset of signal divergence and served to reverse it. Thus, the old, previous differential mapping in the nucleus ruber could be provided with the necessary signals. However, since the matrix neurons also projected downwards, a new differential mapping could be generated, based on the divergent signals of the cortex. In addition to the previous, analog differential mapping, a new one was now added, which belonged to the superordinate, secondary system. It was generated in the thalamic structures.
The third problem was the contralateral inverse excitation, also known as coactivation. The descending cortical output of the motor side reached the spinocerebellumvia the nucleus ruber and the olive nucleus.
Again, signal divergence in the sensory cortex made it necessary to perform analog signal convergence, since the number of motor opponents for inverse contralateral excitation remained approximately the same. However, since the contralateral inverse excitation was realized by the spinocerebellum, signal convergence had to be performed in the cerebellar system as well. This meant that the cortical output had to find a way to the cerebellum and converge on the output neurons. This is how the early, primordial Pontocerebellum was created. It receives a vast amount of cortical input via the moss fiber system, which ultimately converges on the Purkinje cells. This early Pontocerebellum developed into a neural network capable of learning.
The signal divergence in the primary sensory cortex areas was originally developed to achieve a higher system reliability. As a side effect, however, special signal analysis capabilities developed, as already observed in the spinocerebellum. Therefore, we have to analyze the consequences of signal divergence in the cortex areas also under signal theoretical aspects. Again, the starting point is the cable equation for non-markless fibers, because the cortex cortex is largely free of myelin and belongs to the gray matter of the vertebrate nervous system.
The question of at what point in evolution and in which species this greater signal divergence began remains (for the time being) unanswered. It is possible that this began at the stage of the transition from vertebrates to mammals and became a striking feature in primates, because cortical signal divergence can be observed with enormous intensity in them.
Monograph of Dr. rer. nat. Andreas Heinrich Malczan